Digital Twin and Machine-Learning for Optimized Robotic Production of Complex Multiphase Foods
Description
BACKGROUND
In the world of systems engineering, increasingly sophisticated and integrated approaches for AI systems are appearing at a rapid rate. Food production systems have however lagged in the adoption of such technology. One key component to developing a proper AI paradigm is a digital twin of a physical system. A core issue in production lines is the ability of a system to adapt to rapid changes in the environment and system capabilities by autonomously modifying operation-with humans in the loop. By developing these tools for food systems researchers, we believe that we can enhance the ability of researchers to conduct research that invariably involve digital twins, as well as benefiting the nation and the world at large.
GOALS
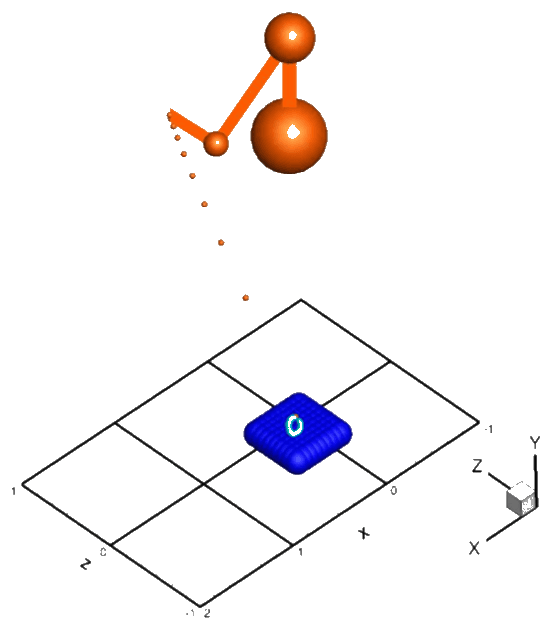
- Develop an MLA to ascertain the appropriate robotic motion needed to create/assemble food products which would be difficult or impossible by guesswork.
- Use created models for designing high-performance feedback control systems; especially their use for predictive control and receding horizon estimation.
- Combine model-based approaches to uncertainty quantification (such as the Kalman-filter or particle filter) using large datasets. The trade-offs between the approaches, their robustness to process changes, and their computational costs will be investigated.
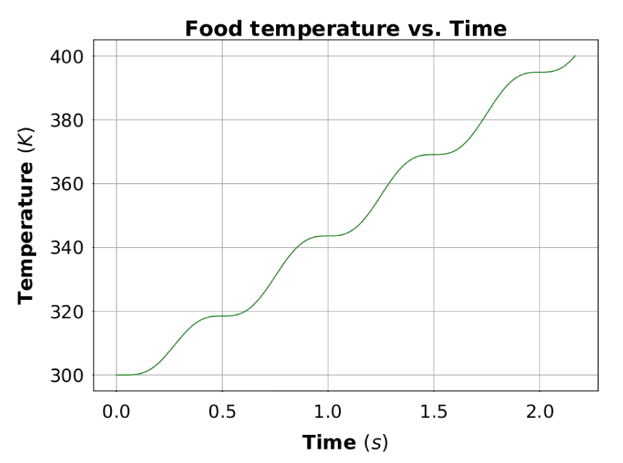
- Develop models for the required heating field (typically electrically induced) and pressure gradient needed in a delivery system (pipe-flow) to heat a multiphase material to a target temperature and to transport the material with a prescribed flow.
IMPACT
- Integrate and implement convergent research in the development of smart, robust, and inexpensive systems that are easy to maintain, upgrade, and deploy, incorporating state-of-the-art technologies.
Photos
Team

Tarek Zohdi
Principal Investigator

Khalid Mosalam
Co Principal Investigator

Francesco Borrelli
Collaborator

Simo Mäkiharju
Collaborator

Mark Mueller
Collaborator

Nitin Nitin
Collaborator

Ilias Tagkopoulos
Collaborator
Publications

Balanced Semisupervised Generative Adversarial Network for Damage Assessment From Low-data Imbalanced-class Regime
